News
[2025/08] My work on SA-DEM has been accepted for publication in T-ASE.
[2025/05] I feel honored to collaborate with Liang Zhang, Qingqing WenRen to co-found a startup aimed at addressing dysphagia in the elderly.
[2025/05] My first-authored research work on SMP-FR has been accepted for publication in Soft Robotics.
[2024/12] I am working closely with the company Deep Robotics on the development of a dexterous anthropomorphic hand in a humanoid robot.
[2024/12] My first-authored research work on Tactile-integrated FlexiRay is now available on Arxiv.
[2024/06] 🎉 My graduation project on dexterous hand is awarded the honor of Top 10 Graduation Thesis and Outstanding Graduation Thesis Scholarship (Media).
[2024/05] 🎉 I am honored to be an outstanding graduate of Zhejiang Province.
|
Research
My research interests are broadly on Robotic Locomotion, Perception and Manipulation, with particular interests in the development of biomimetic robots, soft manipulators, and multimodal haptic sensors.
My work involves the integration of advanced materials, mechanical engineering, and sensor technology to create adaptive robotic systems capable of sophisticated interactions with their environment.
I am passionate about exploring materials and mechanisms that endow robots with the dexterity to manipulate objects with the same finesse as humans.
Representative works are highlighted. Click here for my portfolio.
|
|
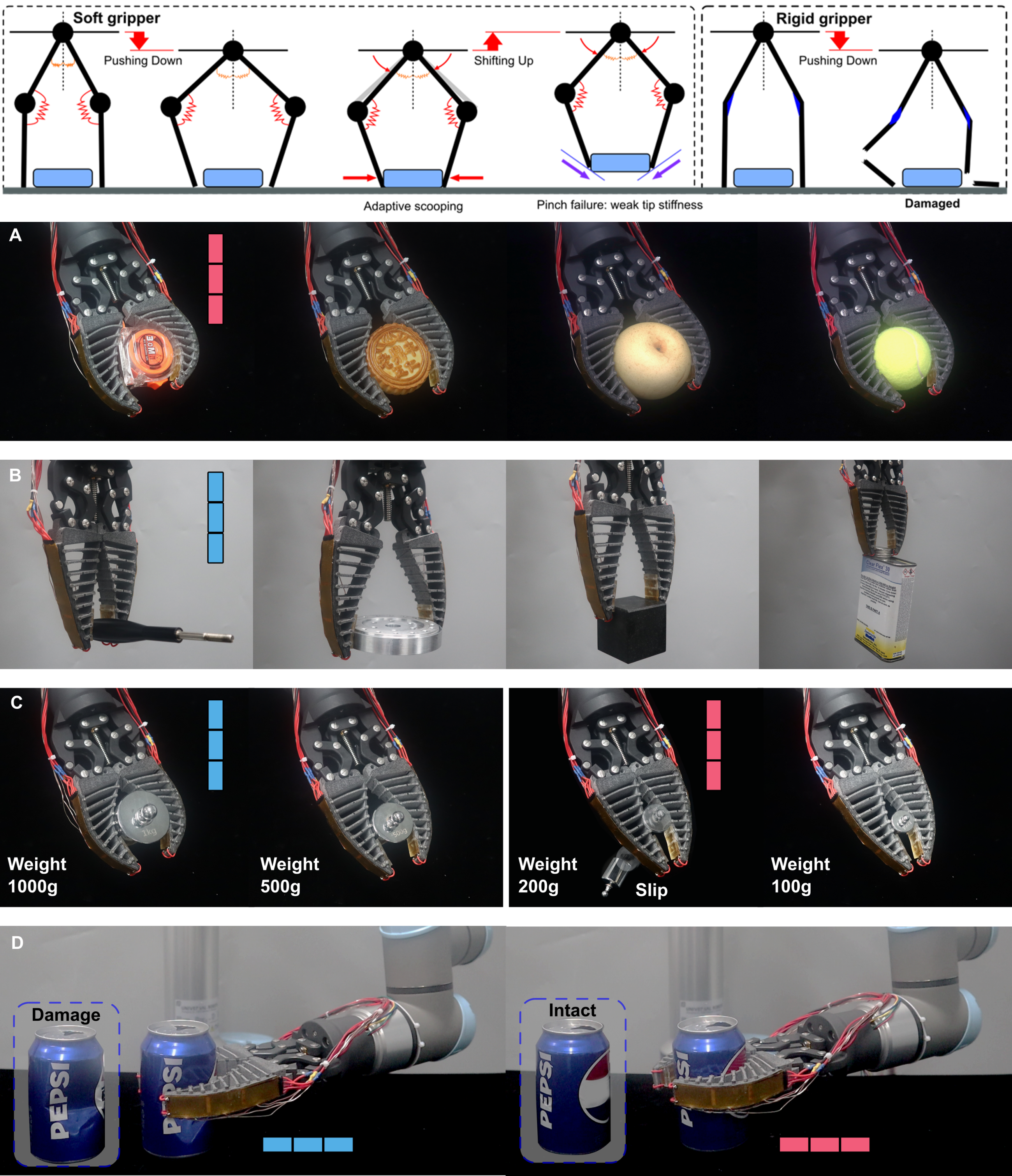
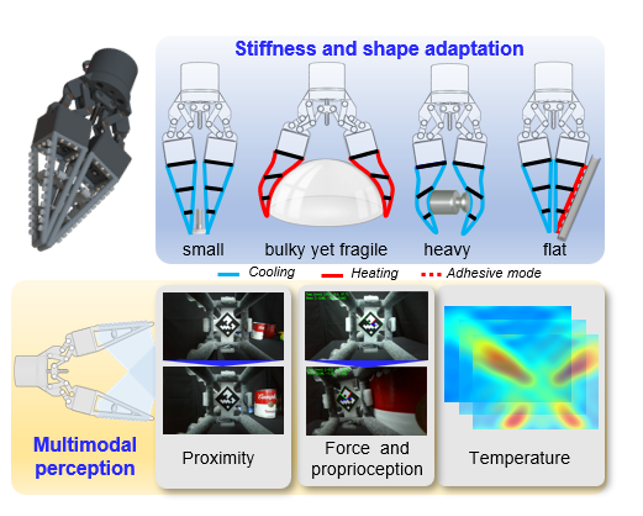
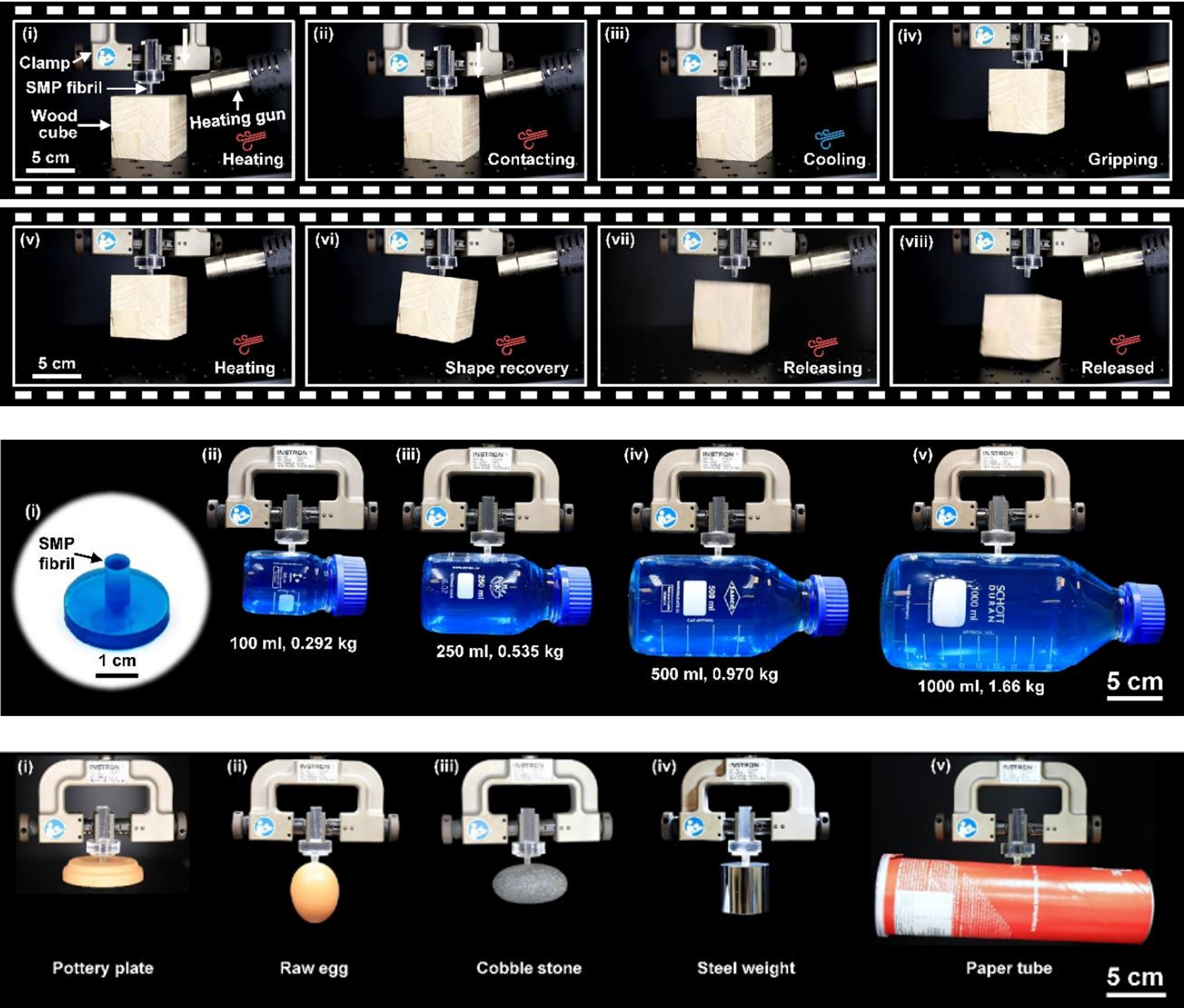
Enabling Tunable Stiffness, Adhesive Grasping, and Interaction-Driven Reconfiguration: A Shape-Memory-Polymer-Enhanced Fin-Ray Gripper
Haotian Guo*, Hao Wu*, Yanzhe Wang*, Yaoting Xue, Tuck-Whye Wong, Tiefeng Li, and Huixu Dong†
(*equal contribution)
Paper /
Video /
Link
Soft Robotics In Press
Take advantage of the thermoresponsive stiffness and reversible adhesion of Shape Memory Polymers (SMPs) to augment the grasping modality in fin-ray gripper design.
Validate the high load capacity, good shape adaptability and adhesive grasping capability with gripper successfully lifting objects of arbitrary shapes and weights, grasping large-diameter sphere, concave, planar, and tiny items.
Actively modify the gripper’s conformation with intended engagement with objects or environment and implement human-inspired strategies to manipulate tools or handle inaccessible objects.
|
|
|
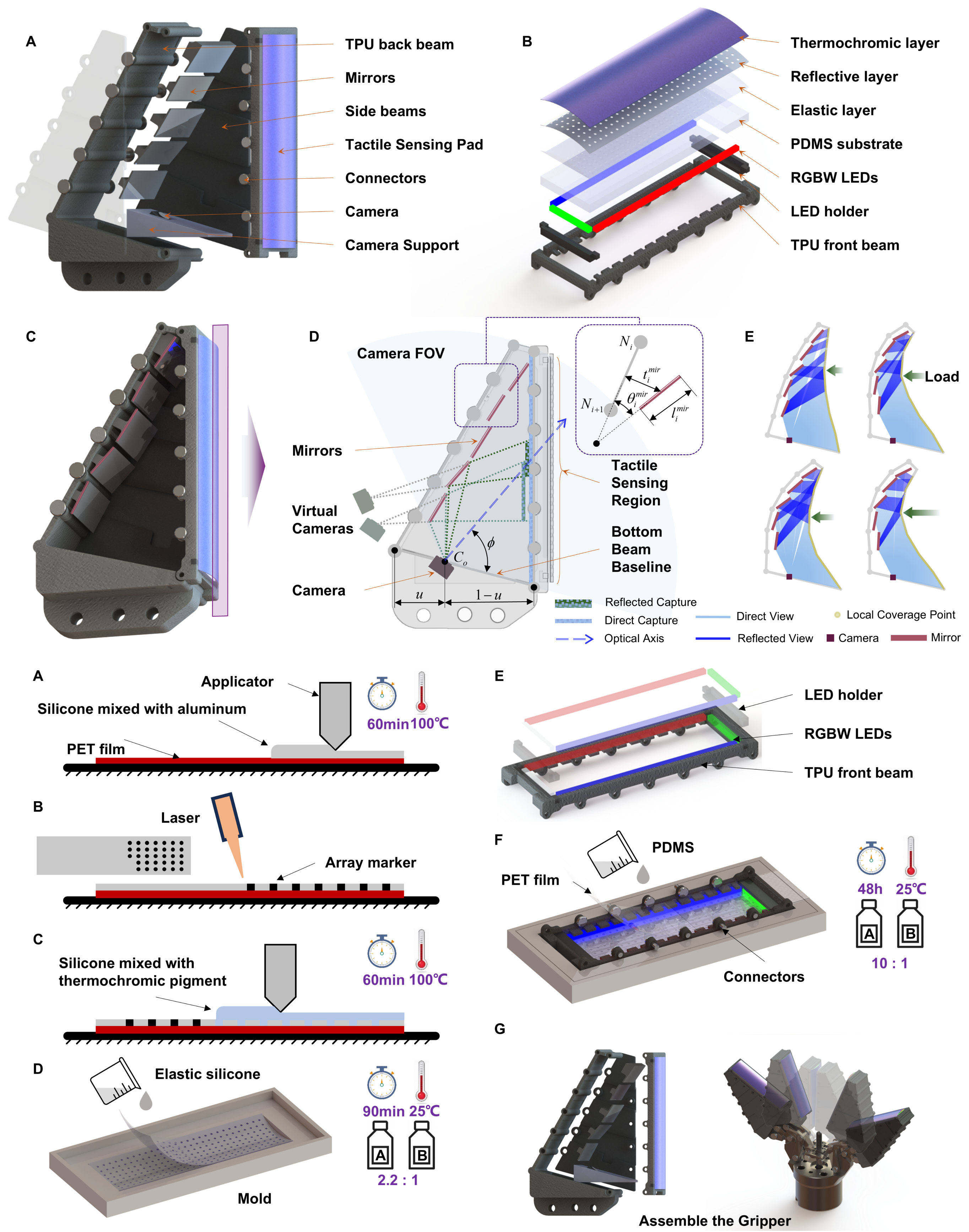
Tactile-integrated FlexiRay: Breaking Planar Limits by Harnessing Large Deformations for Flexible, Full-Coverage, Human-like Multimodal Sensing
Yanzhe Wang*, Haotian Guo*, Hao Wu*, and Huixu Dong†
(*equal contribution)
Paper /
Video /
Arxiv /
Patent
Nature Communications In Minor Revision
Introduce the vision-based tactile sensor to fin-ray gripper which facilitates multimodal perception of contact force, texture, slippage, temperature, and proprioception without compromising the its adaptability and flexibility.
Optimize the positioning and orientation of mirrors with CMA-ES algorithms, ensuring that the internal camera can reliably acquire full-coverage imagery through mirror reflection even during the instances of significant deformation.
Illustrate the performance of the Tactile-integrated FlexiRay in recognizing multimodal contact information in specific grasping and operational tasks through learning-based approach.
|
|
|
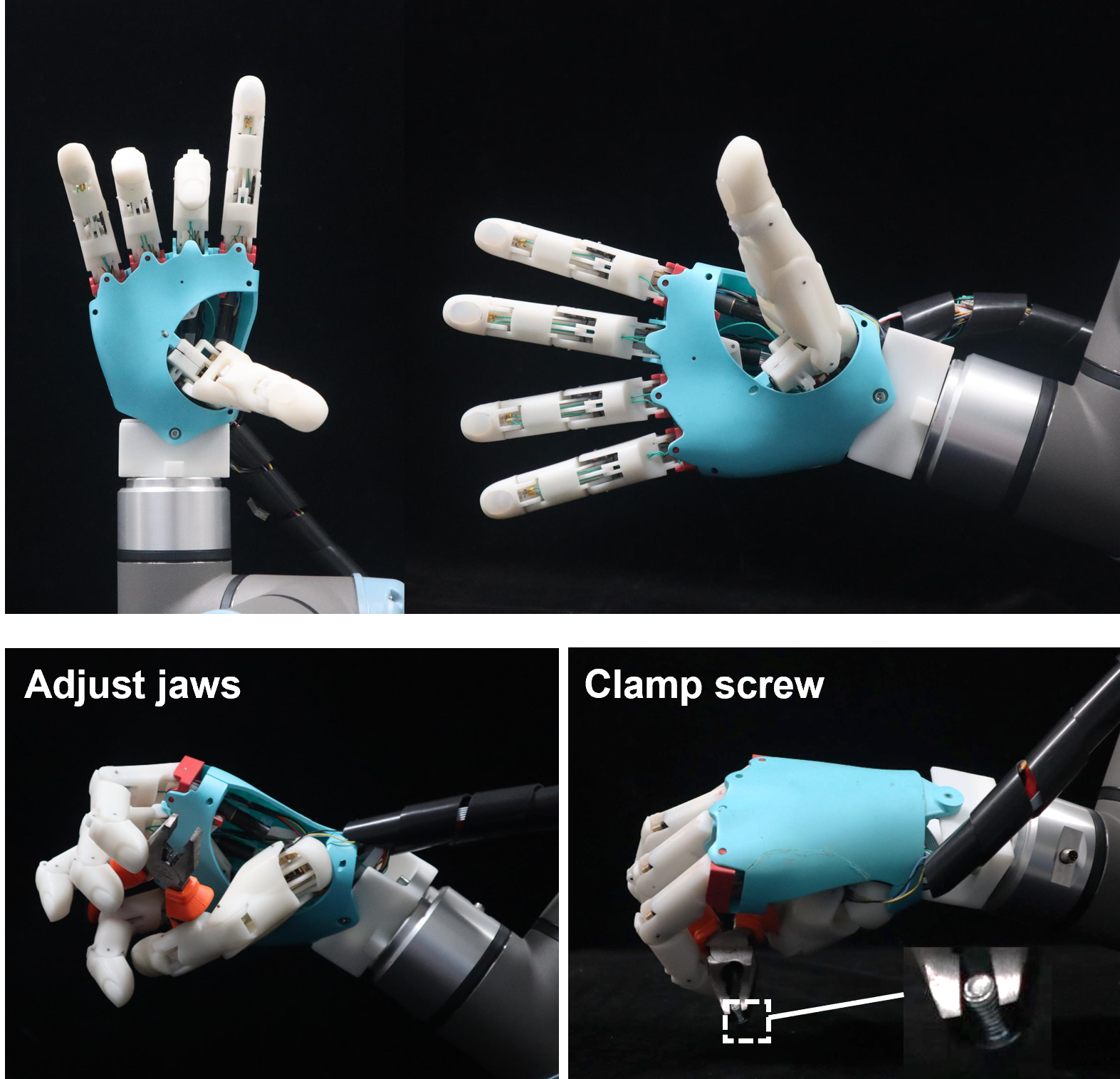
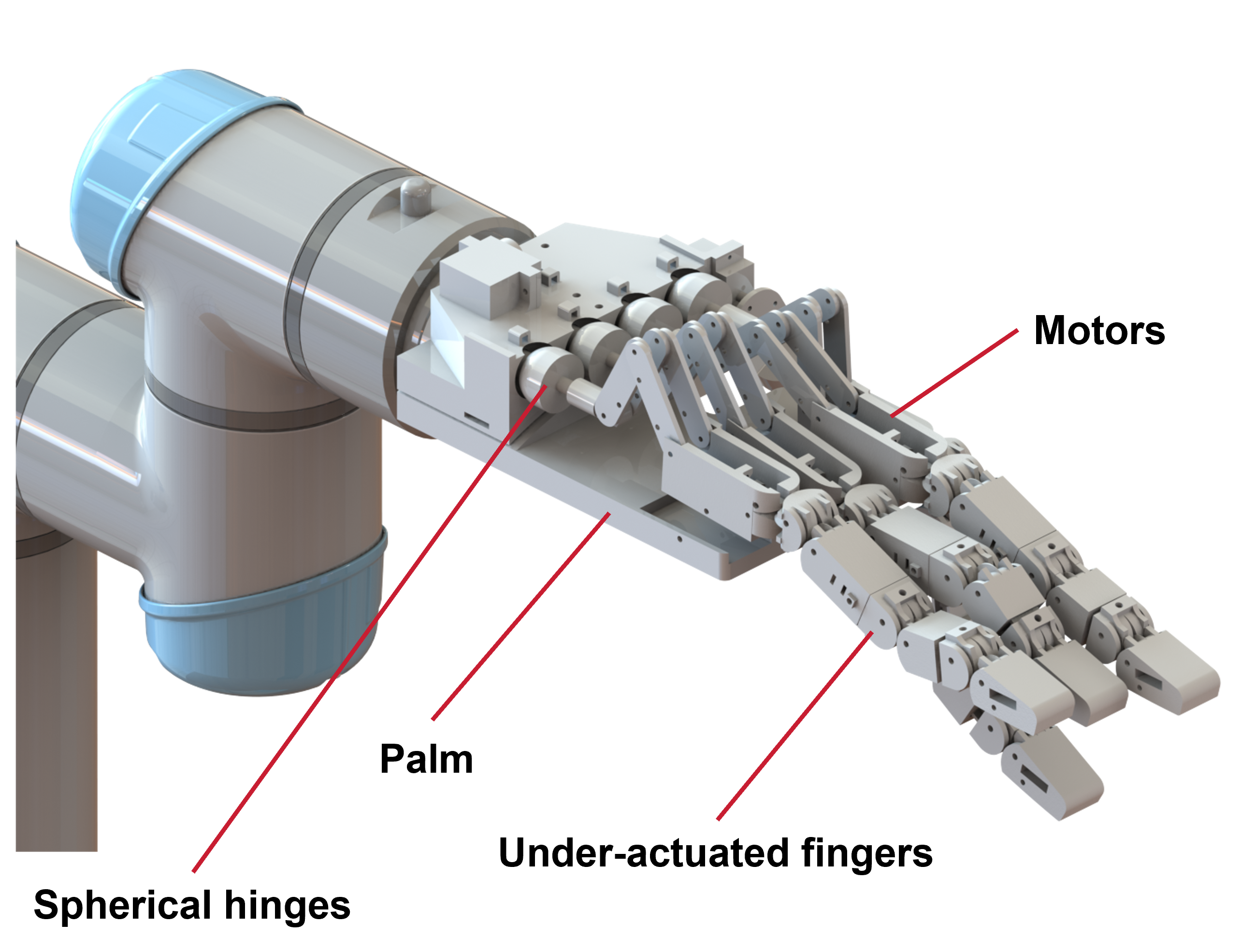
Integrating Biomimetic Synergy with Linkage-Driven Mechanisms: An Anthropomorphic Hand for Versatile Grasping and Manipulation
Hao Wu, Zhaohui Lin, Yanzhe Wang, Haotian Guo, and Huixu Dong†
Paper /
Video /
Poster /
Graduation Thesis /
Patent
Conduct biomechanical analysis of human hand synergistic movements to provide reasonable simplifications of its intricate and compact nature.
Develop an integrated linkage-driven anthropomorphic hand featuring 19 joints and 11 active actuators. Novel linkage mechanisms are proposed with optimized geometric parameters to achieve dexterous movements and resemble natural human gestures.
Perform grasping and manipulation experiments to demonstrate the hand’s capability to adapt to various objects and manipulate tools for specific tasks, validating its human-like operational strategies.
|
|
|
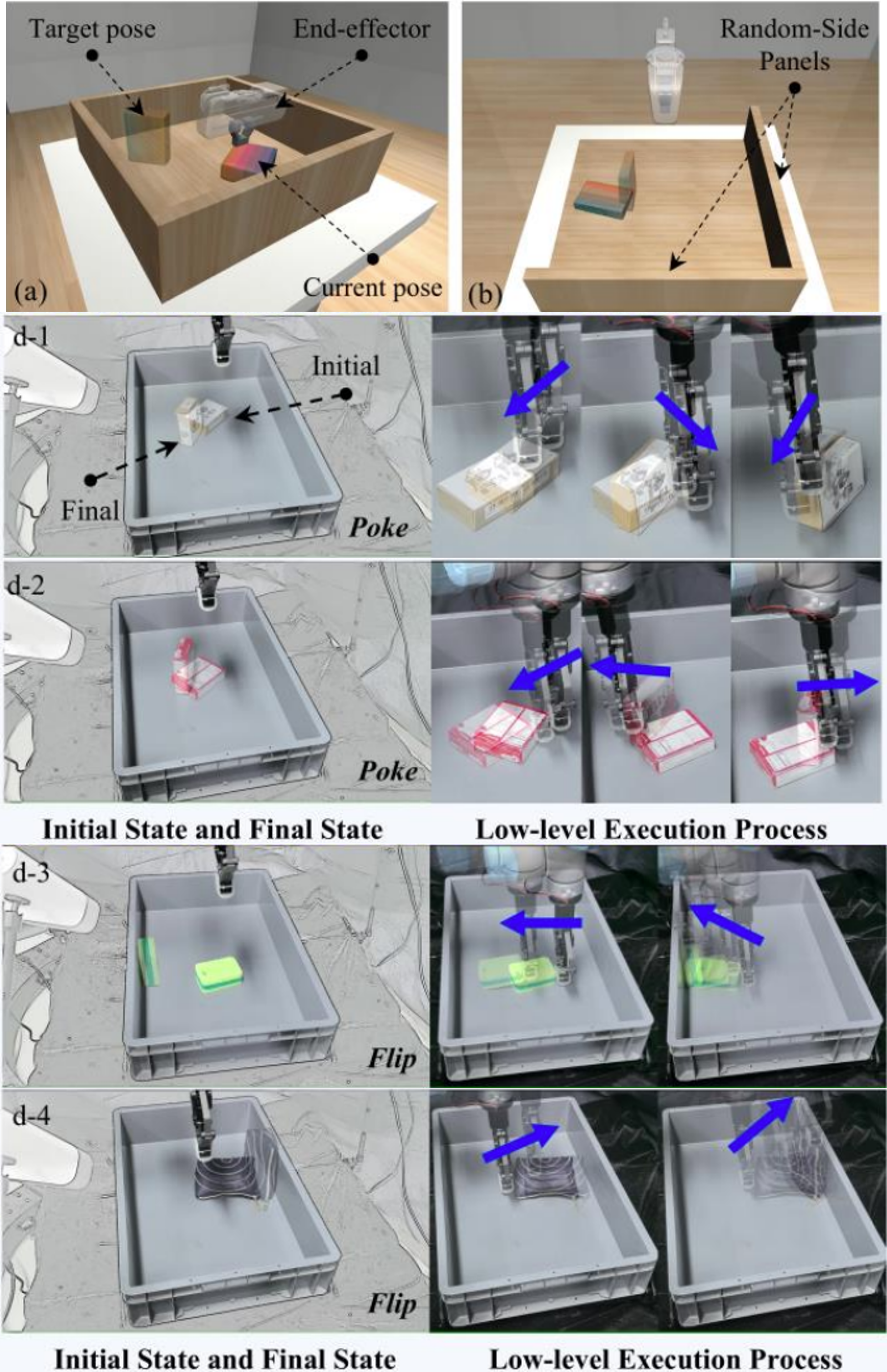
SA-DEM: Dexterous Extrinsic Robotic Manipulation of Non-Graspable Objects via Stiffness-Aware Dual-Stage Reinforcement Learning
Yanzhe Wang, Wei Yu, Hao Wu, Haotian Guo, Huixu Dong†
Paper /
Link
IEEE Transactions on Automation Science and Engineering Accepted
A novel dual-stage reinforcement learning method that integrates object stiffness for the first time to achieve flexible, autonomous planning for non-grasping manipulation.
A unified 3D spatial observation representation and a consistent actor-critic framework that effectively addresses pose decision-making and action interaction in extrinsic dexterous manipulation.
A data-driven learning strategy for the high-level agent that integrates discrete sparse action decisions into a continuous reward representation, significantly enhancing training performance.
The trained policies demonstrate exceptional perceptual decision-making capabilities and dynamic manipulation skills, enabling it to autonomously determine target poses for objects of varying stiffness and execute diverse actions such as pushing, poking, and flipping.
|
|
|
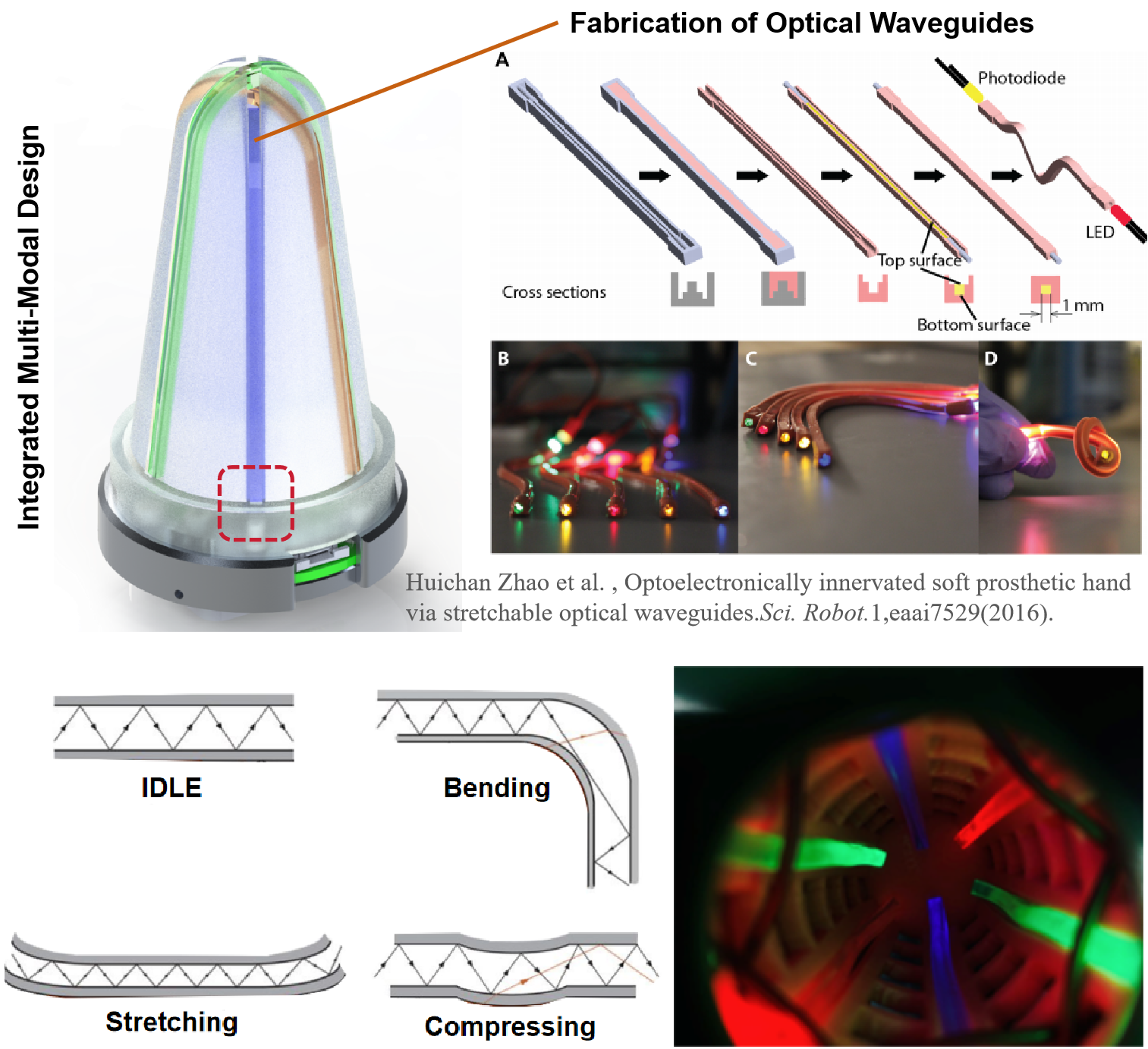
High-Speed Rotating Optics for Multi-Modal and Omnidirectional Dynamic Tactile Perception in Fingertip Sensors
Supervisor: Prof. Huixu Dong; Collaborator: Haotian Guo, Yanzhe Wang.
In Preparation
A rotating LED and light intensity sensor rapidly scan the conical optical waveguide, thereby acquiring omnidirectional contact information. Meanwhile, the persistence of vision can provide stable illumination for RGB camera, enabling the integration of visuotactile sensors that measure static forces with high-frequency response optical waveguide sensors.
The fingertip sensor has multi-modal perception capabilities for contact, pressure, texture, slippage, and high-frequency vibrations, thereby enabling contact-rich manipulation on dexterous hands.
|
|
|
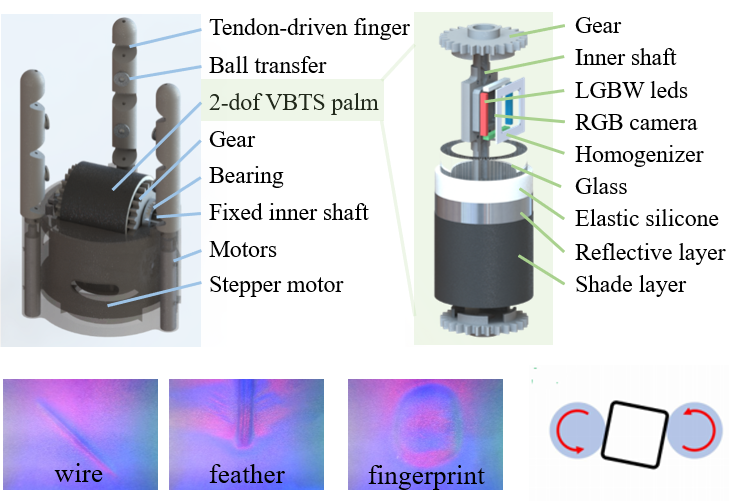
A Visuotactile Roller Palm for Robotic Object Manipulation and Reconstruction
Supervisor: Prof. Huixu Dong; Collaborator: Yanzhe Wang, Yinuo Xu.
In Preparation
Develop a cylindrical, vision-based tactile roller to capture rich, high-resolution contact gemotry and force distributions.
Integrate the visuotactile roller module as the hand's palm capable of rotating in two orthogonal axes. Thus, the hand can perform in-hand manupulation while sensing and reconstructing the grasped object with the accumulated tactile image.
|
|
|
Multi-Spectrally Enhanced Proprioceptive Learning for Variable-Stiffness Robotic Grasping
Supervisor: Prof. Huixu Dong; Collaborator: Yanzhe Wang.
In Preparation
Integrate thermally-responsive shape-memory polymers with passively compliant grippers to achieve tunable-stiffness and multi-mode grasping capabilities.
Fuse image information from RGB and infrared cameras to endow the gripper with proprioception (self-pose), proximity sensing (pre-contact detection), and tactile feedback (contact force and temperature).
|
|
|
Design and Application of Gecko Bio-inspired Climbing Robot Based On SMP Adhesives(Summer Research)
Supervisor: Prof. K.Jimmy Hsia; Collaborator: Changhong LINGHU, Yan Li etc.
In Preparation
Integrate array embedded heaters with E44 epoxy Shape Memory Polymer (SMP) as smart adhesive devices to achieve precise heat transfer and rapid thermo-responsive actuation.
Validate the potential to use the SMP R2G adhesive fibrils as a soft gripper to grip heavy and rough objects, which will further serve as the footpads of a quadrupedal robot for climbing and withstanding heavy payloads on various surfaces.
|
|
|
Development of a Tendon-Driven Dexterous Finger with Variable Length Capability for Advanced Manipulation and Rehabilitation Applications
Supervisor: Prof. Huixu Dong; Collaborator: Haotian Guo, Yanwen Zou, Tianyang Qian.
Patent
In Preparation
Design a tendon-driven dexterous finger with rolling joints capable of bidirectional movements and length adjustment.
Establish kinematic and static models to characterize the finger’s motion, facilitating precise control and actuation.
Conduct experiments to validate the feasibility of the finger as a component in the dexterous hand, rehabilitation exoskeleton, and sensor glove.
|
|
|
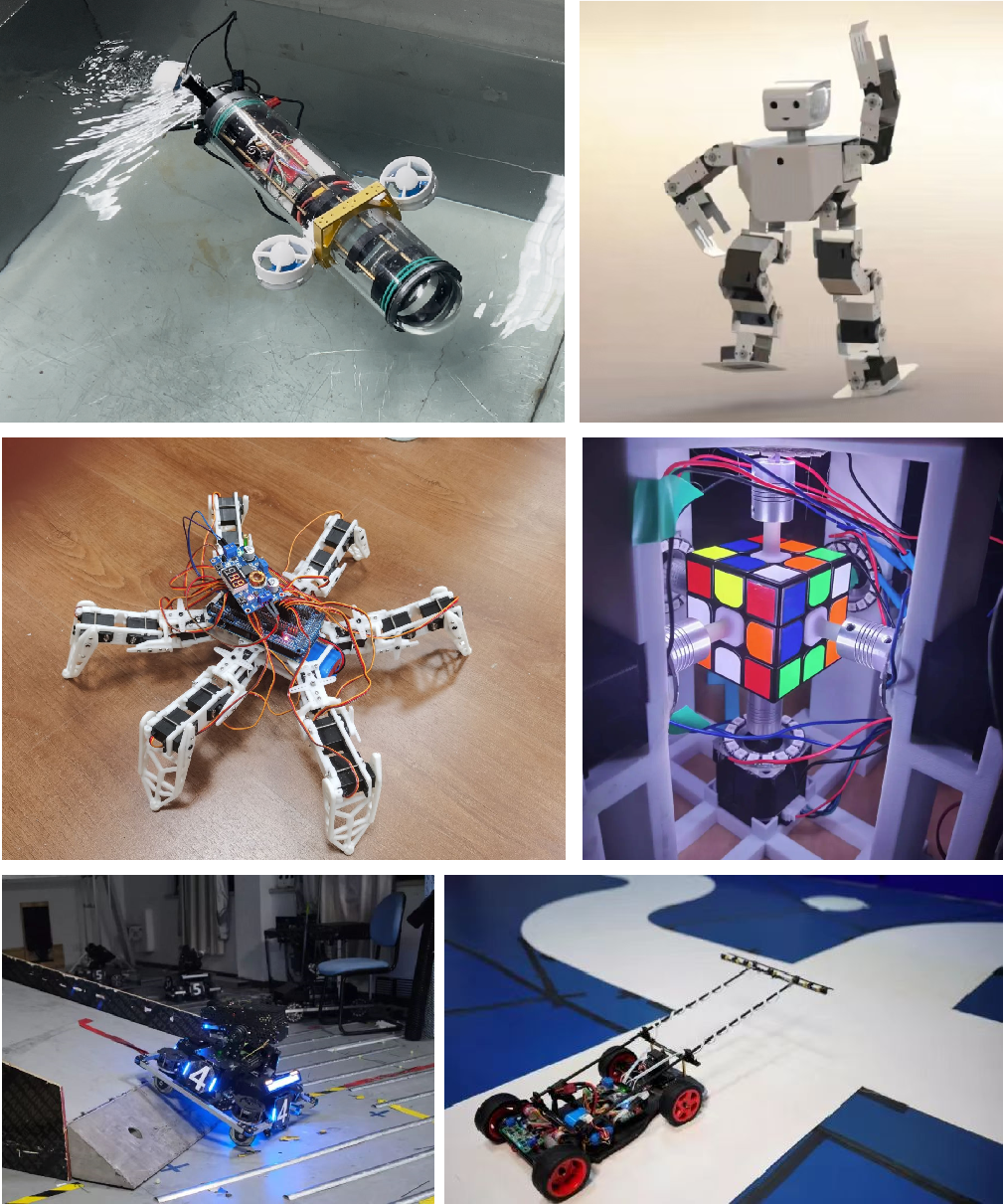
Individual Projects for Interest
Acknowledegement to: Chengkun Zhang, Shijie Zhou, Yujie Kong, Koala Workshop, Junyao Zhuge etc.
(Leader) Construct the hardware and software platform for an Underwater Vehicle. My work involves structural design, modeling and simulation, manufacture and assembly, sensor integration, remote control, and underwater validation.
Accomplish the mechanical fabrication of a 13-DOF Bipedal Robot and achieve motion control with simple gaits.
(Leader) Replicate the appearance and locomotion of spiders and develop a Hexapod Robot that facilitates diverse movements on various road surfaces through the integration of 18 servomotors and 3D-printed components.
(Leader) Develop a Rubik’s Cube Robot capable of automatically recognizing individual color blocks and solving for the solutions, consequently using six stepper motors to restore the cube within seconds.
Member of RoboMaster University Championship.
(Leader) Design the hardware and software of an electromagnetic racing car.
|
Academic Projects
I have gained comprehensive theoretical knowledge as well as practical capabilities during my undergraduate studies. Below is a list of projects that I have led.
|
|
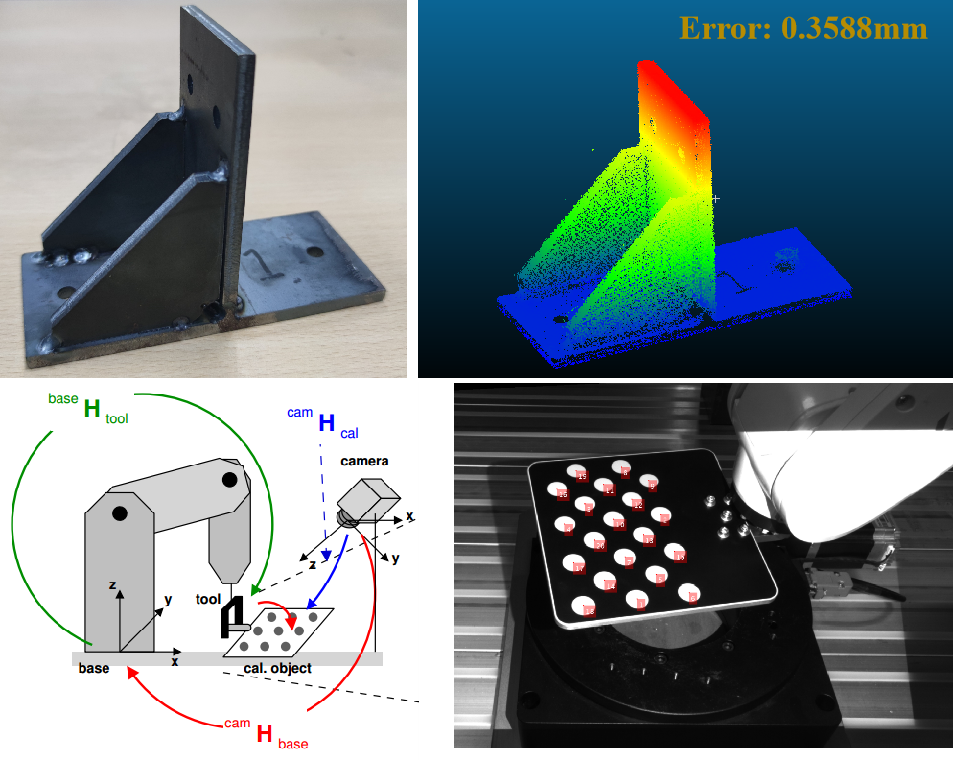
Course: Comprehensive experiment of Mechatronic System
Conduct visual measurement of gear profiles with the software Vision Pro.
Utilize a camera and a single-axis rotary stage to generate point cloud data, thus facilitating the three-dimensional reconstruction of workpieces.
Achieve high-precision eye-to-hand calibration of the robotic system.
|
|
|
Course: Robotics
Calculate the forward and inverse kinematics of a six-axis robotic arm with the Denavit-Hartenberg method.
Implement trajectory planning in both joint space and Cartesian space.
Design controllers for the dynamic control of the robotic arm with Simulink, including gravity compensation PD controller, inverse kinematics controller, and force-position hybrid controller.
|
|
|
Course: Wheeled Robot Technology and Reinforcement Practice
Implement A* and Rapidly-exploring Random Tree *(RRT*) algorithms for global path planning in a known map.
Design a Dynamic Window Approach(DMA) algorithm for online obstacle avoidance. Obstacles can be added to the map after path planning.
The video demonstrates the performance of A* and RRT* path planning & DWA in evading both static and dynamic obstacles.
|
|
|
Course: Analysis of Flow Field
Simulate the process of an object falling into the water and forming a Worthington jet in ANSYS.
Investigate the interfacial flow dynamics and the impact on Worthington jet heights following the impact of objects
on liquid surfaces under varying conditions of mass, velocity, size, and fluid medium.
|
[Drawing]Design and generate the technical drawings of a two-stage cylindrical helical gear reducer with AutoCAD.
[Pdf]Design and optimize robust adaptive controllers for nonlinear uncertain quarter-vehicle suspension systems.
[Github]Design a high-accuracy visual algorithm in Matlab for the recognization of license plate numbers.
[Poster]Produce a poster on the topic "Review of the Needle Cutting Edge and Geometry".
[Video]Participate in a social practice survey focused on the group Agricultural Innovators.
|
Services
Reviewer: TASE, ICRA, RA-L
Active participation in volunteer activity for over 250 hours
Leader of the Student Quality Training Project of Zhejiang University
Attendance at Mech Eng Global Lecture Series of Hong Kong University (Highest Score)
Member of Koala Workshop, Debate Team, and ZJU Unmanned Systems Association
Collaborating to build a startup company Autophagia (10% stake)
|
Selected Awards and Honors
2024: Outstanding Graduates of Zhejiang Province (Top 5%)
2024: Outstanding Graduates of Zhejiang University
2024: Top10 Graduation Thesis, ME, Zhejiang University
2024: Certificate of Excellence Talent Training Program
2024: Bronze Award of National Graduation Design Competition (24/1139)
2024: Outstanding Graduation Thesis Scholarship
2023,2024: Scholarship for Excellence Talent Training Program (Honor Class)
2023: Zhejiang Provincial Government Scholarship
2021-2023: First Prize in the National Collegiate Mathematics Competition
2021-2023: Merit Student of Zhejiang University
2023: Excellence Award in the National College Student Mechanics Competition
2021,2023: Second-Class Scholarship for Outstanding Students of Zhejiang University
2022: Bronze Award in the National College Students Innovation and Entrepreneurship Competition
2022: Second Prize in the National College Students Smart Car Competition
2022: Second Prize in the National College Students Mechanical Innovation Design Competition
2022: Honor Prize in the Mathematical Contest in Modeling
2022: China Nuclear Power Second-Class Scholarship
2022: Third-Class Scholarship for Outstanding Students of Zhejiang University
2022: First Prize in Zhejiang University Student Intelligent Robot Creativity Competition
|
Skills
Expert at Mechanics Modeling, Finite Element Analysis
Experienced in Hands-on Assembly, Functional Validation, and Structural Optimization of Hardware
Highly proficient in the Fabrication and Characterization of Soft Materials
Comprehensive knowledge of PCB Manufacturing and MCU Controlling
Programming ability with Python, C/C++
Good at MATLAB, SOLIDWORKS, ANSYS, Altium Designer, AutoCAD, Arduino, Keil, and ROS
|
Last updated: August.1, 2025
© 2024 Hao Wu
|